Traction Control Overview
We should begin by making it clear that the Pro-M EFI Traction Control system is nothing like what you may have experienced in your daily driver. Those systems are designed to keep your vehicle in control in slippery road conditions. Those of us who actually know how to drive our vehicles will find this feature annoying at best.
The Pro-M EFI Traction Control system is designed to make your vehicle accelerate faster. It will also help to keep you out of trouble during a passing maneuver, where your tires might normally break loose and potentially put you in a ditch on the side of the road. It is the same type of system you will typically find used in drag racing. If your engine makes any sort of real power, you will find that our traction control system not only makes your vehicle much faster, it also makes the vehicle much more enjoyable (and safe) to drive.
The Pro-M EFI traction control system uses your transmission's existing Output Shaft Speed Sensor, or Vehicle Speed Sensor (depending on the application) to monitor your drive shaft speed. Unlike the competition, there is no external traction control box to buy, and you do not need to install an aftermarket drive shaft speed sensor. All you need to do activate the system in the software and set it up as desired.
The system operates on a simple principle. If the driveshaft's rate of acceleration reaches an unrealistic value, then the tires are slipping. When this happens, the Pro-M EFI PCM will remove spark advance to reduce torque until the tires regain traction, then ramp the spark advance back in. The rate of acceleration deemed to be unrealistic, the amount of spark advance removed, and how quickly the advance is ramped back in are all user adjustable.
Additionally, if you are using our Progressive Nitrous Controls, the flow of nitrous will also stop during a traction control event, and may or may not be ramped back in when traction is restored, depending on how you have configured the nitrous controls.
The Pro-M EFI Traction Control System is easy to understand and easy to program. An overview of the Traction Control System tuning parameters is below.
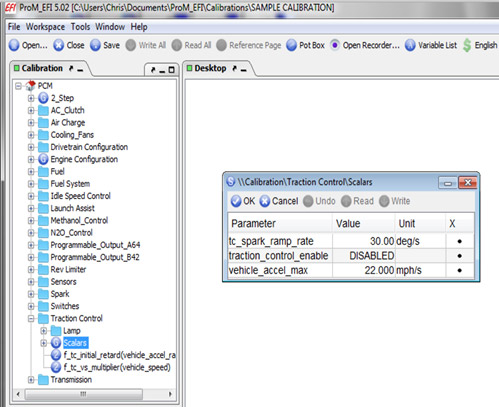
“Traction Control Enable” – Set this to “Enabled” to enable the traction control system.
“Vehicle Accel Max” – This value represents the maximum rate of vehicle acceleration considered to be actual acceleration, as opposed to wheel slip. This is represented as vehicle acceleration, in miles per hour per second. Generally speaking, a value of 22 mph/s is about as fast as a vehicle can accelerate without using an adhesion promoter on the track, so this setting is a good place to start. You may raise the value from there if necessary. It should never be less than 22 mph/s. Any acceleration higher than this value will be considered wheel slip and will activate the traction control system. Typically, maximum vehicle acceleration is achieved when there is some amount of wheel slip, so you should experiment with this value to achieve the best track times.
“TC Spark Ramp Rate” – This parameter determines how quickly the spark advance will ramp back in. This is represented in degrees of spark advance per second. The goal is to ramp the advance back in as quickly as possible without making the tires slip again. If the tires do begin to slip again, advance will again be removed. For this reason, it is better to err on the aggressive side with this setting.
This section is shown below.
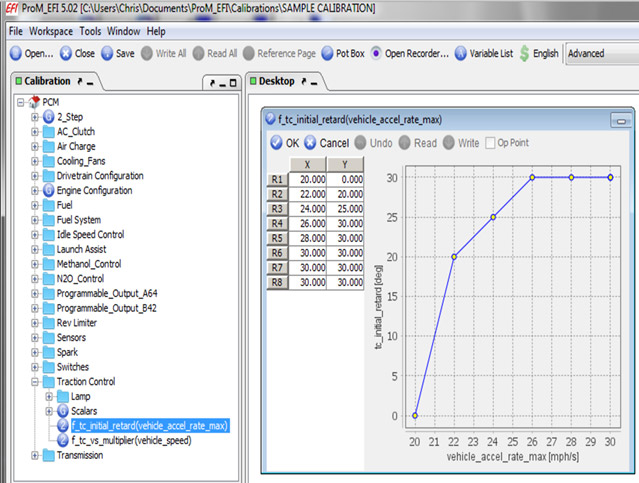
The “TC Initial Retard” table is shown below. This table represents how much spark advance will be removed for a given rate of acceleration. The “X” column represents the acceleration rate in mph/s, and the “Y” column represents how much advance will be removed. Notice that the amount of advance removed ramps up quickly as wheel slip is detected. Adjust the advance values at each acceleration rate until you reduce torque to a degree that achieves the best track times.
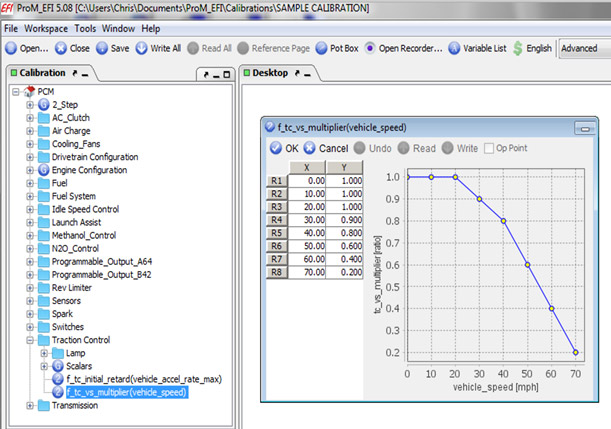
The “TC VS Multiplier” table is shown below. As the vehicle speed increases, less spark retard is required to stop wheel spin. This table reduces the amount of spark advance removed as a function of vehicle speed. It should be noted here that this table represents actual vehicle speed, and not the false vehicle speed reading normally shown by your speedometer when your tires slip. The Pro-M EFI PCM uses advanced code to determine actual vehicle speed, even when the tires are slipping.
The “X” column represents vehicle speed in miles per hour. The “Y” column is a multiplier. The values in the “Y” column will be multiplied by the values in the “TC Initial Retard” table to reduce the amount of spark advance removed as the vehicle's speed increases. For instance, a value of “1” in the “Y” column will have no effect. A value of .8 would result in 80% of the value in the “TC Initial Retard” table. A value of “0.5” would cut the advance removed in half. Notice in the example table below that the values in the “Y” column will result in decreasing spark retard values as vehicle speed increases. The default values shown below should work quite well, but you may adjust the multiplier values in the “Y” column if necessary, to achieve the best possible vehicle acceleration.
PRO_M EFI How-To Videos